Clanker features a pivoting intake system that rotates downward from the robot to acquire game pieces.
A single motor drives a gear train that powers two inward-spinning compliant wheels. When the coral makes contact with these wheels, it is pulled securely into the intake and retained as the intake pivots upward.
After acquisition, the intake feeds the coral directly into the shooter assembly.
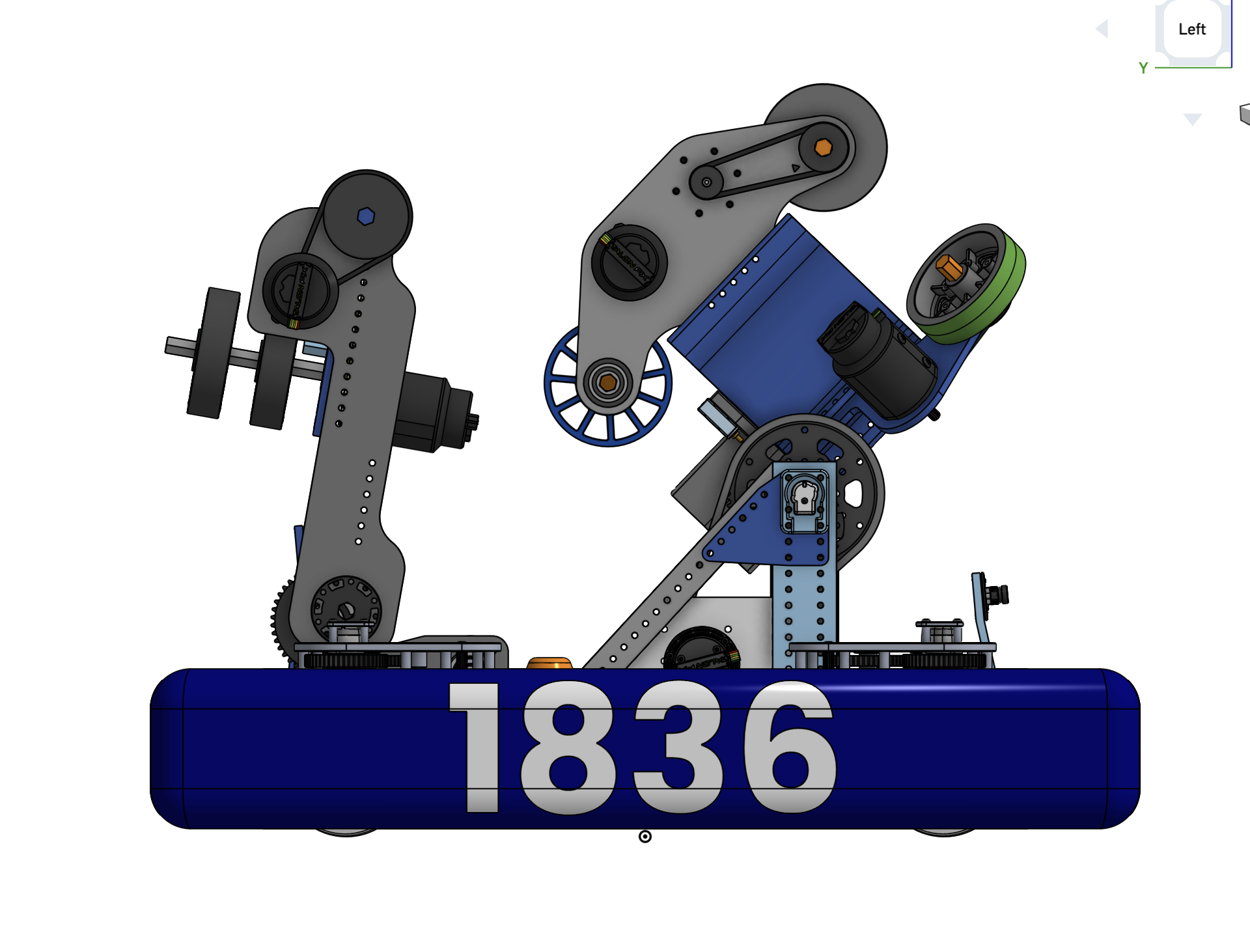
CAD model of Clanker showing intake, shooter, and drivetrain layout